איך עובד רכב אוטונומי
 כיצד פועל רכב אוטונומי?
כיצד פועל רכב אוטונומי?
איך הוא מבין מה הוא רואה?
איך הוא יודע לאן לנסוע ?
אותו יצור מתכתי מלכותי, איך הוא יודע?
בהודעה זו, אני מקווה לספק לכם הבנה בסיסית של המכניקה העיקרית של איך מכונית אוטונומית עובדת. לאחר שמבחינים כי רק חוות דעת הגון של הטכנולוגיה האוטונומית המכונית של מאמרים טכניים שנכתבו על ידי אנשי אקדמיה, החלטתי לפתח סקירה נגישה יותר עבור כל מי שהיה מעוניין בנושא מנקודת מבט עסקית אבל רצה הבנה טובה יותר של הטכנולוגיה הבסיסית. בהודעה זו, אני אשמור את השיחה בעין חדה, הולך עמוק יותר לתוך הטכנולוגיה העתידיים.
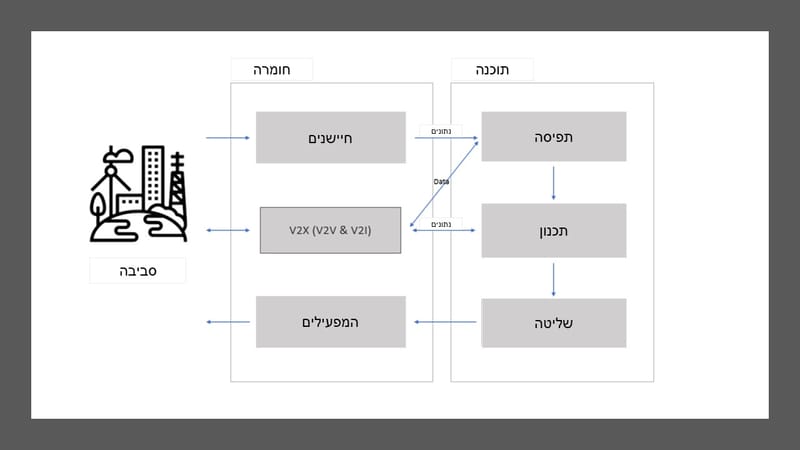
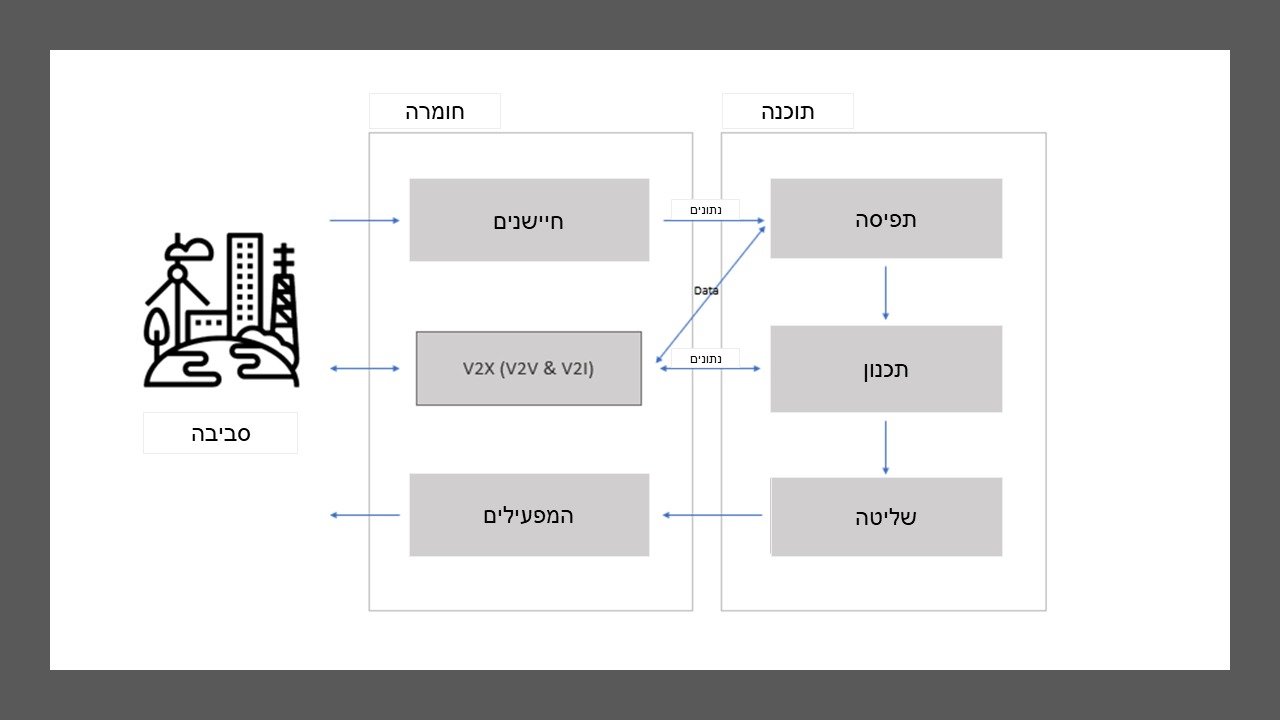
נחזור לשאלה המקורית. כיצד פועל האוטונומיה? המקום הטוב ביותר להתחיל בו הוא הבנת הארכיטקטורה הפונקציונלית של המכונית האוטונומית. ארכיטקטורה פונקציונלית היא מודל ארכיטקטוני המזהה את תפקודי המערכת ואת האינטראקציות שלה וכיצד הם פועלים יחד כדי להשיג מטרה מסוימת. ארכיטקטורה פונקציונלית של מכונית אוטונומית היא כמו מפת אנטומיה של גוף האדם. בעוד מפת אנטומיה מדגימה את האיברים השונים ואת הדרכים השונות שבהן הם מתקשרים עם המשימה של שמירה על הגוף חי, הארכיטקטורה הפונקציונלית של מכונית אוטונומית ממחישה כיצד המרכיבים העיקריים של המכונית לעבוד יחד כדי להשיג את המשימה של נהיגה עצמית מבלי להפר קודים משפטיים או אתיים.
אין הסכמה על הארכיטקטורה התקינה "הנכונה" של המכונית האוטונומית בקרב אנשי אקדמיה ומומחים בתעשייה. עם זאת, אנו יכולים לסווג באופן רחב את המרכיבים העיקריים של הרכב האוטונומי, כמו כל מכונה אחרת, לתוך חומרה ותוכנה. ניתן לחלק עוד יותר את שתי הקטגוריות הללו לתתי-קבוצות נוספות. החומרה מתפצלת באופן רחב לתוך חיישנים, רכב לרכב (V2V) ו-רכב לתשתית (V2I) טכנולוגיה, ומפעילים. התוכנה מתחלקת באופן רחב לתהליכים של תפיסה, תכנון ובקרה. אני אדבר יותר על כל אחת מתתי-הקטגוריות האלה בעתיד, אבל בינתיים, נתחיל עם הבסיס. אני אמשיך להשתמש במטאפורה של גוף האדם כדי להמחיש בצורה טובה יותר את המושגים האלה.
חומרה לרכב אוטונומי
רכיבי החומרה של המכונית האוטונומית מקבילים לחלקים הפיזיים של גוף האדם, המאפשרים לנו לקיים אינטראקציה עם הגירויים של העולם החיצון. רכיבי החומרה מאפשרים למכונית לבצע משימות כגון ראייה (באמצעות חיישנים), תקשורת (באמצעות טכנולוגיית V2V), והזזה (באמצעות מפעילים).
- חיישנים: חיישנים הם המרכיבים המאפשרים לאוטונומיה לקבל מידע גולמי על הסביבה. חיישנים הם כמו העיניים שלך, אשר מאפשרים לך להבין מה קורה בסביבה שלך. החיישנים העיקריים במכוניות אוטונומיות כוללות GPS / יחידת מדידה אינרציאלית (IMU), מצלמה, LiDar ורדאר. כל חיישנים אלה יש היתרונות שלהם ואת החסרונות. LiDar, למשל, הוא נהדר ללכוד מידע על סוגים שונים של אור הסביבה (אם לילה או יום), ואילו המצלמות עשויות להיות קושי בטיפול חסימות מסוימות שנגרמו על ידי צללים או תנאי תאורה גרועים אחרים. בהתאם לכך, רוב כלי הרכב האוטונומיים משלבים את הקריאות של סוגי חיישנים מרובים כדי להוסיף יתירות נוספת ולפצות על חולשות החיישנים השונים בתהליך הנקרא מיזוג היתוך.
- טכנולוגיית V2X (טכנולוגיית V2V ו- V2I): רכיבי V2V ו- V2I מאפשרים לרכב האוטונומי לשוחח ולקבל מידע מסוכני מכונות אחרים בסביבה, כגון מידע מועבר מאור עירוני שהפך לירוק או לאזהרות ממכונית מתקרבת. אתה יכול לחשוב על טכנולוגיית V2X כמו הפה שלך והאוזניים. הפה שלך מאפשר לך לתקשר עם בני אדם אחרים, והאוזניים שלך מאפשרות לך להבין מה בני אדם אחרים מתקשרים אליך.
- המפעילים: המפעילים הם המרכיבים של מכונה האחראית על השליטה וההעברה של המערכת. המפעילים הם כמו שרירי הגוף שלך, להגיב על אותות אלקטרוכימיים מהמוח שלך, כך שאתה מזיז חלקים כאלה כמו היד או הרגל.
כלי רכב אוטונומיים
בעוד רכיבי החומרה של המכונית האוטונומית לאפשר למכונית לבצע פונקציות כגון לראות, לתקשר, ולנוע, התוכנה היא כמו המוח, אשר מעבד מידע על הסביבה, כך שהמכונית מבינה מה לנקוט פעולה - אם לנוע, להפסיק, להאט, וכו 'תוכנה אוטונומית הרכב ניתן לסווג לשלוש מערכות: תפיסה, תכנון, ושליטה.
- תפיסה: מערכת התפיסה מתייחסת ליכולת של הרכב האוטונומי להבין מה המידע הגולמי הנכנס דרך חיישנים או רכיבי V2V אומר. זה מאפשר למכונית להבין מתוך מסגרת תמונה נתון אם אובייקט מסוים הוא עוד מכונית, הולך רגל, או משהו אחר לחלוטין. תהליך זה מקביל לאופן שבו המוח שלנו מעבד את המידע שאנו משיגים דרך ראייה למשמעות. Photoreceptors של העיניים שלנו (חיישנים) לספוג גלי אור הנובע מן הסביבה וממיר את גלי האור לתוך אותות אלקטרוכימיים. רשתות של נוירונים מעבירים אותות אלקטרוכימיים אלה כל הדרך חזרה לקליפת המוח החזותית של המוח, שם המוח שלנו מעבד את משמעות האותות האלקטרוכימיים האלה. בדרך זו, המוח שלנו יכול להבין אם דפוס אור מסוים.
- תכנון: מערכת התכנון מתייחסת ליכולתו של הרכב האוטונומי לקבל החלטות מסוימות על מנת להשיג מטרות מסדר גבוה יותר. כך אוטונומי יודע מה לעשות במצב - בין אם לעצור, ללכת, להאט וכו 'מערכת התכנון פועלת על ידי שילוב של מידע מעובד על הסביבה (כלומר מן החיישנים ורכיבי V2X) עם מדיניות הוקמה ידע על אופן הניווט בסביבה (למשל, לא להריץ הולכי רגל, להאט כאשר מתקרב סימן להפסיק, וכו '), כך המכונית יכולה לקבוע מה לנקוט פעולה (למשל לעקוף מכונית אחרת, איך להגיע ליעד, וכו' ). באופן דומה, בדומה למערכת התכנון במכונית האוטונומית, התהליכים באונה הקדמית של המוח האנושי מאפשרים לנו לחשוב ולקבל החלטות.
- בקרה: מערכת הבקרה מתייחסת לתהליך ההמרה של הכוונות והמטרות הנגזרות ממערכת התכנון לפעולות. הנה מערכת הבקרה אומר את החומרה (actuators) את התשומות הדרושות שיוביל את התנועות הרצויות. לדוגמה, רכב אוטונומי, בידיעה כי הוא צריך להאט כאשר מתקרב אור אדום, מתרגמת את הידע הזה לפעולה של החלת הבלמים. בבני אדם, התהליכים המתרחשים במוח הקטן ממלאים את התפקיד המקביל. המוח הקטן אחראי על הפונקציה החשובה של בקרת המנוע. זה מאפשר לנו, למשל, ללעוס כאשר הכוונה הרצויה היא לאכול.
איך כולם עובדים ביחד
עכשיו שיש לנו הבנה טובה של המרכיבים העיקריים של רכב אוטונומי, בואו נסקור תרחיש של איך כולם עובדים יחד.
תרחיש: המכונית עצרה בצומת מול האור האדום.
המשימה: המכונית צריכה להתקדם כאשר הרמזור הופך ירוק מבלי להפר את חוקי התנועה או לפגוע בישויות אחרות.
- חיישנים: חיישני המכונית לוקחים מידע גולמי על הסביבה. הוא אינו יודע מה פירושו של מידע זה - לפחות לא עד שהוא מגיע לשלב התפיסה.
- טכנולוגיית V2X: הרמזור מתקשר למכונית שזה עתה הפך לירוק. מכוניות אחרות שמסביב לתקשר את עמדתם בסביבה.
- תפיסת הבמה: הרכב הופך את המידע הגולמי הנכנס משלב התפיסה למשמעות ממשית. המידע על המצלמה מגלה שהאור רק הפך ירוק וכי יש מעבר הולכי רגל מול הרכב לרחוב.
- שלב התכנון: הרכב משלב מידע חישה מעובד במהלך שלב התפיסה עם המידע הנכנס V2X כדי לקבוע כיצד להתנהג. מדיניות המכונית היא בדרך כלל לזוז כאשר האור הופך לירוק; עם זאת, יש לו מדיניות overriding זה לא צריך לנוע במהירות על הולכי רגל. מה שצריכה המכונית לעשות בתרחיש זה הוא: המכונית מחליטה כי, על בסיס שילוב של מידע סביבתי ואת המדיניות הכללית של איך זה צריך לפעול, זה לא צריך לנוע.
- שלב הבקרה: המכונית חייבת לתרגם את החלטתה לא לעבור לפעולה. במקרה זה, פעולה זו (או ליתר דיוק, חוסר פעולה במקרה זה) היא להישאר במקומה ולשמור על הבלמים עוצרים.
- המפעילים: המכונית שומרת על הבלמים עוצרים, שהוא תוצאה של תהליך קבלת ההחלטות שלה כאמור לעיל.
כפי שניתן לראות, הטכנולוגיה מאחורי הרכב האוטונומי היא לא קשה מאוד להבין כאשר מבינים במושגים מרכזיים.